技術コラム【吐出の羅針学】サーボモーターに組み込まれる検出器
ACサーボモーターには、3つの目的のために回転角検出器が組み込まれています。1:モーターの位置制御をするための角度(位置)検出、2:速度制御をするための速度検出、3:正弦波電流を流すための電気角検出です。今回はこの検出器について説明します。
回転角検出器の種類
ACサーボモーターに組み込まれる回転角検出器は、エンコーダーかレゾルバーです。
| 検出器 | 特長 |
|---|---|
| エンコーダー | 小型で高分解能なものが製作できる |
| レゾルバー | 温度、振動、衝撃、ノイズなどの耐環境性に優れる |
エンコーダー
エンコーダーの主な種類は、下表の仕様の組み合わせとなります。
| 仕様例 | |
|---|---|
| 検出方式 | 光学式(透過型、反射型)、磁気式 |
| 出力信号の位相 | インクリメンタル(90°位相差)、 アブソリュート(純2進コード、グレイコード、M系列コード、BCDコード) |
| 出力形態 | パルス出力(電圧、オープンコレクター、ラインドライバー)、シリアル通信、正弦波出力 |
1:光学式(透過型)インクリメンタルエンコーダー
分割精度の高精度化や高分解能化がしやすい最もポピュラーな検出器です。エンコーダーの回転ディスクにスリットがあり、このスリットを光源と受光部が挟み込む構造となっていて、光がスリットを透過したときに信号がONします。回転ディスクが回るとこの信号がON-OFFしてパルス状に信号を発生します。
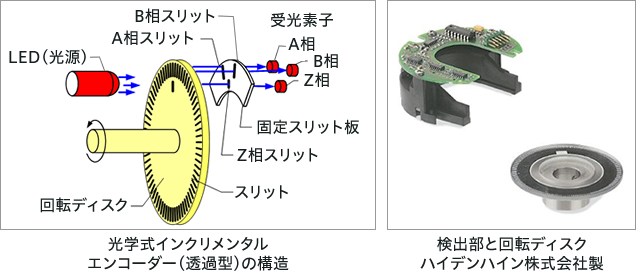
エンコーダーの出力は1回転に1パルス出力するZ(ゼロ)相信号と、エンコーダーパルス数分出力するA相とB相の3つの信号があります。A相とB相は位相が90°ずれていて、回転方向によって位相が逆になります。
インクリメンタルエンコーダーで回転位置を知るためにはZ相信号を原点として、A、B相の信号をカウントアップまたはカウントダウンします。また、A、B相パルスの立上りエッジ、立下りエッジでカウントするとパルス数の2倍、4倍の分解能で位置が検出できます。このエンコーダーの特長は、相対的な移動量(何パルス分回転したか)は常時検出できますが、絶対位置(原点からの位置)は原点検出後でなければわからない、という点です。この意味でインクリメンタル(相対的)エンコーダーと呼ばれています。
2:アブソリュートエンコーダー(純2進コード)
電源投入直後に絶対位置が検出できるものがアブソリュート(絶対値)エンコーダーです。このエンコーダーは回転位置(番地)を出力信号のON-OFF(2進数)で表します。1回転を8分割するエンコーダーは、下の図のように出力が3本(20,21,22)となります。純2進(NATURAL BINARY)コードでは、複数の出力が同時に変化するときがあります。
3:アブソリュートエンコーダー(グレイコード)
複数の出力が同時に変化しないようにしたのがグレイコード方式で、交番2進(CYCLIK BINARY)コードとも言います。
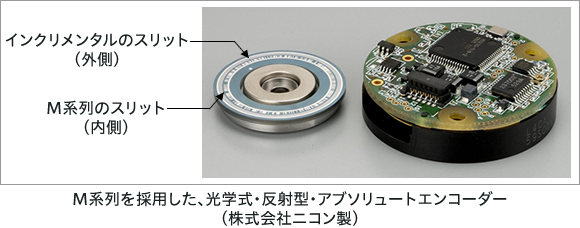
4:アブソリュートエンコーダー(M系列コード)
パラレル出力のアブソリュートエンコーダーは分解能を高くすると、半径方向に大きくなってしまうことや出力信号線が増えてしまうことが短所です。そこで、インクリメンタル用のスリットとアブソリュート用のM系列のスリットをもたせ、さらに反射型にすることで小型化したアブソリュートエンコーダーもあります。
参考 - M系列:2進数の乱数のひとつ。
下の例では、4つ連続した値が違う場所にはありません。"1"をスリット、"0"を遮光部として回転ディスクの円周上に配置すると、現在位置を知ることができます。
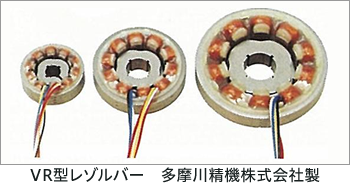
レゾルバー
レゾルバーは汎用モーターと同じように巻き線と積層鋼板で構成され、振動、温度などの耐環境性に優れています。防衛産業ではレゾルバーが回転検出器として使用され、現在では飛行機や電車、ハイブリッドカーなどにも広がっています。特に、欧州ではレゾルバーを組み込んだサーボモーターが好まれています。
| 仕様例 | |
|---|---|
| 構造 | 回転トランス型、VR型 |
| 軸倍角 | 単極(1X)、多極(nX)、複速度(1X-nX) |
| 信号処理方法 | BRX(振幅変調型 : 1相励磁/2相出力)、BRT(位相変調型:2相励磁/1相出力)、 BRS(位相変調型 : 2相励磁/2相出力) |
レゾルバーの分解能
通常のレゾルバーの軸倍角数は1です。これを軸倍角が1X(イチエックス)のレゾルバー、または単極レゾルバーと呼びます。回転角の分解能は1024分割/回転、2048分割/回転が一般的です。ただし、レゾルバーの精度やR/D変換ICによっては216(=65,536)分割/回転まで実現できるものもあります。1回転あたりの分割数を単極レゾルバーよりも大きくするためには、軸倍角の大きなレゾルバーを選びます。軸倍角数が2であるものを軸倍角2Xの多極レゾルバーと呼び、分割数を1Xの場合の2倍にできます。
| 単極レゾルバー | 多極レゾルバー | |||||
|---|---|---|---|---|---|---|
| 軸倍角数 | 1 | 2 | 3 | … | 32 | … |
| 軸倍角 | 1X | 2X | 3X | … | 32X | … |
| 分解能 | 1024/回転~65,536/回転 | 1Xの2倍 | 1Xの3倍 | … | 1Xの32倍 | … |
複速度レゾルバー
多極レゾルバーでは、単極レゾルバーの信号を1回転中にその軸倍角数分だけ繰り返します。したがって、単極レゾルバーではモーター回転角の絶対値がわかりますが、多極レゾルバーでは1回転に複数回の同じ位置情報が発生してしまい、絶対値はわかりません。そこで、分解能を高く、かつ、絶対値検出をするという場合には単極レゾルバーと多極レゾルバーを組み合わせて使用します。このように2つのレゾルバーが一体になったものを複速度レゾルバーといいます。